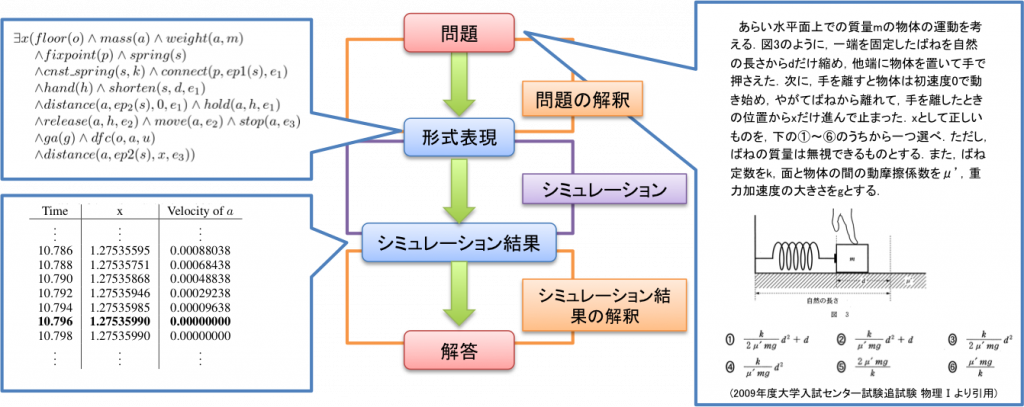
物理シミュレーションの応用の一つに,自然言語処理における曖昧性解消があります.例えば以下のような問題文を理解することを考えてみましょう.
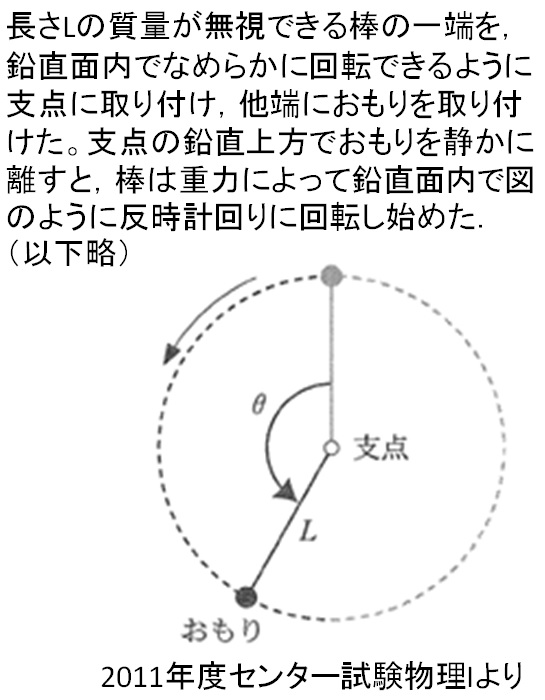
こ の文章を人間が読んだ場合,当然のことながら「おもりを離す」とは,「手で持っていたおもりを手から離す」を意味しています.しかし,背景知識や常識を持 たない計算機の場合,(1)「手からおもりを離した」(2)「おもりを棒から離した.ただしおもりは手で持ったまま」(3)「おもりを手から離した.同時 におもりを棒から離した」という3種類の解釈の可能性があります.従来の自然言語処理ではこれらの3つの可能性から適切な解釈を選択することは困難でした が,それぞれの場合に将来何が起こるかを物理シミュレーションすることで曖昧性を解消することができます.以下に示すのはそれぞれのケースの物理シミュ レーションの結果です.問題文では「棒が回転した」と書かれており,図ではおもりが移動しているので,正しい解釈は(1)であることが分かります.
こ の文章を人間が読んだ場合,当然のことながら「おもりを離す」とは,「手で持っていたおもりを手から離す」を意味しています.しかし,背景知識や常識を持 たない計算機の場合,(1)「手からおもりを離した」(2)「おもりを棒から離した.ただしおもりは手で持ったまま」(3)「おもりを手から離した.同時 におもりを棒から離した」という3種類の解釈の可能性があります.従来の自然言語処理ではこれらの3つの可能性から適切な解釈を選択することは困難でした が,それぞれの場合に将来何が起こるかを物理シミュレーションすることで曖昧性を解消することができます.以下に示すのはそれぞれのケースの物理シミュ レーションの結果です.問題文では「棒が回転した」と書かれており,図ではおもりが移動しているので,正しい解釈は(1)であることが分かります.